|
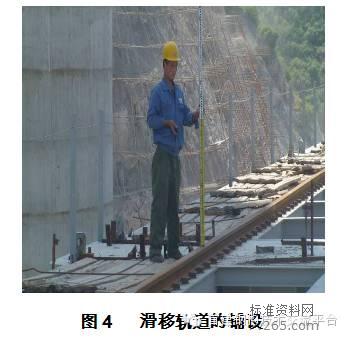
№мµА°ІЧ°јыНј4ЎЈ
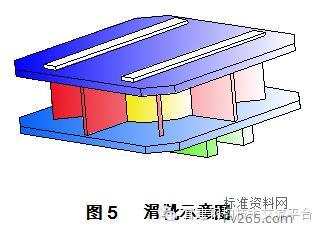
2.2.2 »¬СҐЙиЦГ »¬ТЖ·ЅКЅОЄЛ®ЖЅЦ±ПЯН¬ІЅНЖЅшЈ¬СЎУГ·ЦЖ¬»¬СҐ°еЧйєП»¬ТЖ·ЅКЅЎЈТАѕЭ±ѕ№¤іМНшјЬЦ§ЧщМШµгЈ¬АыУГФЦ§ЧщµЧ°еЧчОЄ»¬ТЖµЧ°е¶ЁО»Ј¬»¬СҐ°еЧй°ІЧ°ФЪ№мµАЙП»¬ТЖЎЈФЪ№мµАБЅІа»¬ТЖµЧ°еЙПЙиІаПтµІ°еЈ¬µІ°еУл№мµАБЅІаБфТ»¶ЁµДІаПтјдП¶Ј¬Ул№мµАД¦ІБЅбєПГжІЙУГ¶юБт»ЇовИ󻬼БЎЈ»¬СҐµІ°еїЙТФУРР§µД±ЈЦ¤НшјЬХыМ廬ТЖ»щ±ѕОЮєбПтЛ®ЖЅБ¦Ј¬ЗТ»¬ТЖ№¤їцПВНшјЬЦ§ЧщКЬБ¦јЖЛгОЄ°ІИ«Ј¬НшјЬ¶ФУ¦№мµАО»ЦГЙиєбПтµІїйЈ¬Хыёц»¬ТЖ№эіМКЗ°ІИ«їЙїїµДЎЈ»¬СҐКѕТвНјјыНј5ЎЈ
2.3 ґоЙиЅЕКЦјЬЖґЧ°ЖЅМЁ ФЪНшјЬ°ІЧ°Т»ІаЅфМщНшјЬПВ·ЅёЦЦщЧціц±кјЗµгєН»щґЎПЯЎўТФ»щґЎ±кµгєН»щґЎПЯЈ¬ґоЙиЕМїЫКЅВъМГємЅЕКЦјЬЖЅМЁЎЈЅЕКЦјЬґоЙиід·ЦїјВЗТмРОНшјЬµД±кёЯ±д»ЇЈ¬ЅЕКЦјЬЙПІїЙиЦГЅЧМЭЧґІЩЧчЖЅМЁЈ¬ёьєГµДВъЧгНшјЬЖґЧ°µДРиТЄЈ¬НшјЬ»щґЎЦ§ЧщµД°ІЧ°ѕ«¶ИТІµГµЅ±ЈХПЈ¬К№НшјЬµДЦ§ЧщёЯІоВъЧг№ж·¶ТЄЗуЎЈЖЅМЁБўГжКѕТвНјєНґоЙиНјјыНј6ЎўНј7ЎЈ
2.4 КэЧЦТєС№ЕАРР»ъЖчИЛµчКФ°ІЧ° ЕАРР»ъЖчИЛЕАРРЖчБ¬ЅУ¶ъ°еєёЅУФЪНшјЬЦ§ЧщЅЪµгЙПЈ¬ЕАРРЖчУлБ¬ЅУ¶ъ°еІЙУГЅВЅбБ¬ЅУЎЈЕАРР»ъЖчИЛ¶ҐНЖµгЙиЦГФЪµЪ¶юёцЦ§ЧщµгО»ЦГЈ¬ГїМх№мµАЙиТ»МЁЕАРР»ъЖчИЛЈ¬їЙМṩЧоґу1000KNµД¶ҐНЖБ¦Ј¬»ъЖчИЛµД¶ҐНЖО»ТЖЧоґуѕ«¶ИїЙґп0.01mmЈ¬НкИ«ДЬ№»ВъЧг±ѕ№¤іМАЫјЖ»¬ТЖµДК©№¤ѕ«¶ИЎЈЕАРР»ъЖчИЛБ¬ЅУКѕТвНјјыНј8ЎЈ
ФЪ»¬ТЖ»ъЖчИЛ°ІЧ°З°У¦¶ФЦчТЄЙи±ёЅшРРµчКФЈ¬ТФВъЧг°ІЧ°єуµДК№УГЎЈКэЧЦТєС№»ъЖчИЛ°ІЧ°µчКФЦчТЄ°ьє¬КэЧЦТєС№Н¬ІЅЕАРР»ъЖчИЛЈЁјУЅфЧ°ЦГЎўУНёЧЎўЧФЛшЖчµИЈ©ЎўТєС№±ГФґПµНіј°№ЬµАЎўјЖЛг»ъН¬ІЅїШЦЖПµНіЎЈ КЧПИ°ІЧ°У뻬ѥБ¬ЅУ¶ъ°еЈ¬ФЩ°ІЧ°УНёЧЈ¬ґэУНёЧ№М¶ЁєуЅшРРЧФЛшЧ°ЦГµД°ІЧ°Ј¬°ІЧ°НјјыНј9ЎЈИ»єуАыУГУНёЧј°ЧФЛшЧ°ЦГБ¬ЅУТєС№№ЬПЯ»ъТєС№Йи±ёЈ¬Чоєу°ІЧ°јЖЛг»ъН¬ІЅїШЦЖПµНіЈ¬№¤ЧчИЛФ±ЅшРРЙи±ёµчКФЈ¬јыНј10ЎЈ |