|
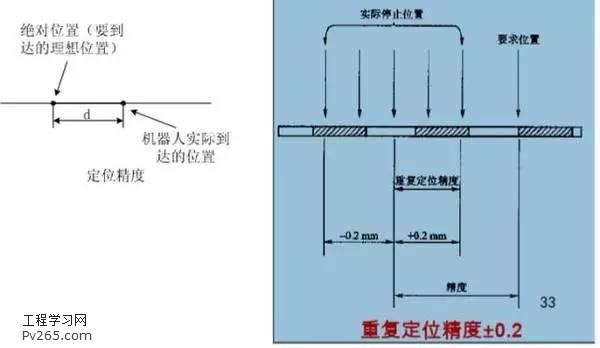
。其形状取决于机器人的自由度数和各运动关节的类型与配置。机器人的工作空间通常用图解法和解析法两种方法进行表示。 4、工作速度 机器人在工作载荷条件下、匀速运动过程中,机械接口中心或工具中心点在单位时间内所移动的距离或转动的角度。 5、工作载荷 指机器人在工作范围内任何位置上所能承受的最大负载,一般用质量、力矩、惯性矩表示。还和运行速度和加速度大小方向有关,一般规定高速运行时所能抓取的工件重量作为承载能力指标。 6、分辨率 能够实现的最小移动距离或最小转动角度。 7、精度 重复性或重复定位精度:指机器人重复到达某一目标位置的差异程度。或在相同的位置指令下,机器人连 续重复若干次其位置的分散情况。它是衡量一列误差值的密集程度,即重复度。
三、机器人常用材料 1)碳素结构钢和合金结构钢 这类材料强度好,特别是合金结构钢,其强度增大了4~5倍,弹性模量E大,抗变形能力强,是应用最广泛的材料。 2)铝、铝合金及其他轻合金材料 这类材料的共同特点是重量轻,弹性模量E并不大,但是材料密度小,故E/ρ之比仍可与钢材相比。有些稀贵铝合金的品质得到了更明显的改善,例如添加3.2%(重量百分比)锂的铝合金,弹性模量增加了14%,E/ρ比增加了16%。 3)纤维增强合金 这类合金如硼纤维增强铝合金、石墨纤维增强镁合金等,其E/ρ比分别达到11.4×107和8.9×107。这种纤维增强金属材料具有非常高的E/ρ比,但价格昂贵。 4)陶瓷 陶瓷材料具有良好的品质,但是脆性大,不易加工,日本已经试制了在小型高精度机器人上使用的陶瓷机器人臂样品。 5)纤维增强复合材料 这类材料具有极好的E/ρ比,而且还具有十分突出的大阻尼的优点。传统金属材料不可能具有这么大的阻尼,所以在高速机器人上应用复合材料的实例越来越多。 6)粘弹性大阻尼材料 增大机器人连杆件的阻尼是改善机器人动态特性的有效方法。目前有许多方法用来增加结构件材料的阻尼,其中最适合机器人采用的一种方法是用粘弹性大阻尼材料对原构件进行约束层阻尼处理。 四、机器人主要结构
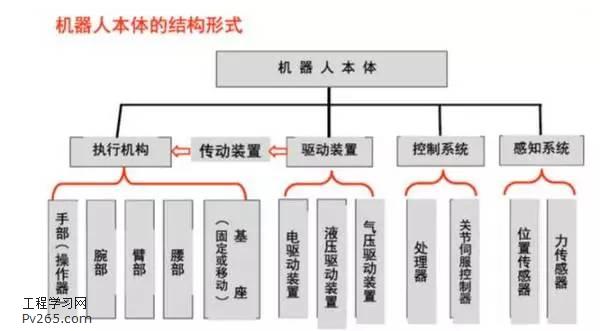
㈠、机器人驱动装置 概念:要使机器人运行起来, 需给各个关节即每个运动自由度安置传动装置 作用:提供机器人各部位、各关节动作的原动力。 驱动系统:可以是液压传动、气动传动、电动传动, 或者把它们结合起来应用的综合系统; 可以是直接驱动或者是通过同步带、链条、轮系、谐波齿轮等机械传动 3/7 首页上一页123456下一页尾页 |