|
2.2.1 PID»э·Ц·ЦАлҝШЦЖ
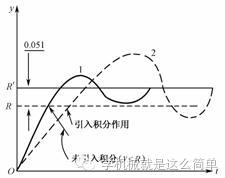
ЎЎЎЎФЪТ»°гөДPIDҝШЦЖ·ҪКҪЦРЈ¬ФЪҝӘКј»тНЈЦ№№ӨЧчөДЛІјдЈ¬»тХЯҙу·щ¶ИөШёш¶ЁБҝКұЈ¬УЙУЪЖ«ІоҪПҙ󣬹КФЪ»э·ЦПоөДЧчУГПВЈ¬Ҫ«»бІъЙъТ»ёцәЬҙуөДі¬өчЈ¬ИзНј2-3ЦРЗъПЯ2ЛщКҫЎЈ
|
Нј2-3 »э·Ц·ЦАлЧчУГЗъПЯұИҪП |
|
|
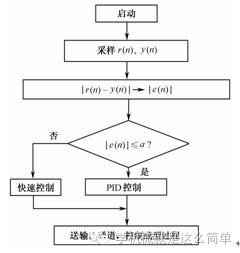
ЎЎЎЎОӘҙЛЈ¬ҝЙТФІЙУГ»э·Ц·ЦАлКЦ¶ОЈ¬јҙФЪұ»ҝШЦЖБҝҝӘКјёъЧЩКұЈ¬ИЎПы»э·ЦЧчУГЈ¬ЦұөҪұ»ҝШЦЖБҝҪУҪьРВөДёш¶ЁЦөКұЈ¬ІЕҝЙТФФЪPIDЛгКҪЦРЈ¬ТэИлИзПВөДЛг·ЁВЯјӯ№ҰДЬЎЈҪ«КҪЈЁ2-2Ј©ёДРҙОӘЈә

ЈЁ2-8Ј©
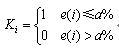
ЎЎЎЎКҪЦРЈ¬KiЎӘЎӘТэИлөДВЯјӯПөКэЎЈ
ЎЎЎЎНјЦРЗъПЯ1ОӘІЙУГБЛ»э·Ц·ЦАлКЦ¶ОәуөДҝШЦЖ№эіМЎЈұИҪПЗъПЯ1әН2ҝЙјыЈ¬УҰУГ»э·Ц·ЦАл·Ҫ·ЁәуЈ¬ПФЦшҪөөНБЛұ»ҝШЦЖБҝөДі¬өчБҝЈ¬ІўЛх¶МБЛөчҪЪКұјдЎЈ
2.2.2 ҝЙұдФцБҝPIDҝШЦЖ
ЎЎЎЎ№ӨТөҝШЦЖПөНіУРКұ»бМбіцХвСщөДТӘЗуЈ¬PIDЛг·ЁөДФцТжКЗҝЙұдөДЈ¬ТФІ№іҘКЦҝШ№эіМөД·ЗПЯРФТтЛШЎЈХвКұЈ¬ҝШЦЖЛг·ЁОӘЈә

ЈЁ2-9Ј©
ЎЎЎЎҝЙұдФцТжPIDҝШЦЖЖчҝЙөИР§ОӘИзНј2-4ЛщКҫ·ҪҝтНјЎЈЖдҪб№№НјПаөұУЪPIDҝШЦЖЖчФЩҙ®БӘТ»ёц·ЗПЯРФәҜКэІҝ·ЦЎЈКөПЦҝЙұдФцТжPIDЛг·ЁөДіМРтБчіМНјИзНј2-5ЛщКҫЎЈ
|
Нј2-4 ҝЙұдФцТжPID·ҪҝтНј |
|

|
|
Нј2-5 ҝЙұдФцТжPIDЛг·ЁіМРтБчіМНј |
|

|
2.2.3 КұјдЧоУЕөДPIDҝШЦЖ
ЎЎЎЎКұјдЧоУЕҝШЦЖУЦіЖҝмЛЩҝШЦЖЈ¬јҙҝШЦЖПөНіөДёш¶ЁЦөУЙТ»ёцЧҙМ¬ФЛ¶ҜөҪБнТ»ёцЧҙМ¬ЛщҫӯАъөД№э¶ЙКұјдЧо¶МЎЈҙУАнВЫЙПҝЙТФЦӨГчЈ¬¶ФУЪТ»ёцПЯРФ¶ЁіЈҝШЦЖПөНіЈ¬УРЈә

ЈЁ2-10Ј©

ЈЁ2-11Ј©
ЎЎЎЎКҪЦРЈ¬X(t)ЎӘЎӘЧҙМ¬ПтБҝЎЈ
ЎЎЎЎЎЎЎЎЎЎu(t)ЎӘЎӘҝШЦЖПтБҝЎЈ
ЎЎЎЎЎЎЎЎЎЎy(t)ЎӘЎӘКдіцПтБҝЎЈ
ЎЎЎЎЎЎЎЎЎЎAЈ¬BЈ¬CЎӘЎӘіЈКэҫШХуЎЈ
ЎЎЎЎУЙіхКјЧҙМ¬ Ј¬өҪЦХ¶ЛЧҙМ¬ Ј¬өҪЦХ¶ЛЧҙМ¬ өДКұјдЧо¶МЈ¬јҙЈә өДКұјдЧо¶МЈ¬јҙЈә

ЈЁ2-12Ј©
ЈЁФјКшМхјюЈә Ј© Ј©
ЎЎЎЎЛщТӘЗуөДЧоУЕҝШЦЖЧчУГКЗЈә

ЎЎЎЎПФИ»КЗТ»ёцҝӘ№ШәҜКэЎЈ¶ФУЪТ»ёцnҪЧөДПөНіЈ¬ТӘКөПЦЙПКцҝШЦЖДҝұкЈ¬ЦБ¶аҝӘ№ШЈЁn-1Ј©ҙОЎЈ
ЎЎЎЎФЪ№ӨТөЧФ¶Ҝ»ҜУҰУГЦРЈ¬ЧоУР·ўХ№З°НҫөДКЗBang-BangУл·ҙАЎҝШЦЖПаҪбәПөДҝШЦЖПөНіЈ¬јҙЈә
 ЈЁ2-13Ј© ЈЁ2-13Ј©
ЎЎЎЎПаУҰөДјЖЛг»ъҝШЦЖјтөҘБчіМНјИзНј2-6ЛщКҫЎЈ
|
Нј2-6 ёҙКҪҝмЛЩҝШЦЖБчіМНј |
|
|
1/2 12ПВТ»ТіОІТі
|