|
2.2.4 ЦЗДЬPIDїШЦЖ
ЎЎЎЎДЈєэїШЦЖЎўЙсѕНшВзїШЦЖєНЧЁјТїШЦЖКЗДїЗ°ЦЗДЬїШЦЖСРѕїЦРЧоОЄ»оФѕµДБмУтЈ¬±ѕРЎЅЪѕНЖдЧйіЙµДјёЦЦµдРНЦЗДЬPIDїШЦЖПµНіµД»щ±ѕЅб№№ЎўФАнј°МШµг·Ц±рЅшРРЅйЙЬЎЈ
ЎЎЎЎ1Ј®ДЈєэPIDїШЦЖ
ЎЎЎЎДЈєэїШЦЖПµНіКЗТФДЈєэКэС§ЎўДЈєэУпСФРОКЅµДЦЄК¶±нКѕєНДЈєэВЯјµД№ж»®НЖАнОЄАнВЫ»щґЎЈ¬ІЙУГјЖЛг»ъїШЦЖјјКх№№іЙµДТ»ЦЦѕЯУР·ґАЎНЁµАµДКэЧЦїШЦЖПµНіЎЈЛьµДЧйіЙєЛРДКЗѕЯУРЦЗДЬРФµДДЈєэїШЦЖЖчЎЈ
ЎЎЎЎ1Ј©»мєПРНДЈєэPIDїШЦЖЖч
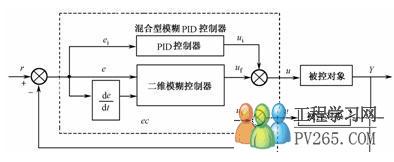
ЎЎЎЎНј2-7ЛщКѕДЈєэїШЦЖЖчЅб№№КЗУЙW.L.BialkowskiУЪ1983ДкМбіцµДЈ¬ЛьКЗУЙТ»ёціЈ№ж»э·ЦїШЦЖЖчєНТ»ёц¶юО¬ДЈєэїШЦЖЖчПаІўБЄ¶ш№№іЙµДЎЈ
|
Нј2-7 »мєПРНДЈєэPIDїШЦЖЖч |
|
|
ЎЎЎЎ2Ј©ОуІоeДЈєэ»э·ЦµДPIDДЈєэїШЦЖЖч
ЎЎЎЎ1988ДкУЙM.BassevilleМбіцµДУЦТ»ЦЦPIDїШЦЖЖчЈ¬ИзНј2-8ЛщКѕЎЈЛьКЗТ»ЦЦ¶ФОуІоeµДДЈєэЦµЅшРР»э·ЦµДPIDїШЦЖЖчЈ¬ХвЦЦ¶ФОуІоeµДДЈєэЦµЅшРР»э·ЦµДPIDДЈєэїШЦЖЖчїЙУГАґПыіэґуµДПµНіУаІоЎЈ
|
Нј2-8 ОуІоeДЈєэ»э·ЦµДPIDДЈєэїШЦЖЖч |
|
|
ЎЎЎЎ2Ј®ЧЁјТPIDїШЦЖ
ЎЎЎЎЧЁјТїШЦЖµДКµЦККЗ»щУЪКЬїШ¶ФПуєНїШЦЖ№жВЙµДёчЦЦЦЄК¶Ј¬ТФЦЗДЬµД·ЅКЅАґАыУГХвР©ЦЄК¶Ј¬ЗуµГКЬїШПµНіѕЎїЙДЬµШУЕ»ЇєНКµУГ»ЇЈ¬Ль·ґУііцЦЗДЬїШЦЖµДРн¶аЦШТЄМШХчєН№¦ДЬЎЈЛжЧЕОў»ъјјКхєНИЛ№¤ЦЗДЬјјКхµД·ўХ№Ј¬іцПЦБЛ¶аЦЦРОКЅµДЧЁјТїШЦЖЖчЎЈИЛГЗЧФИ»µШТІПлµЅУГЧЁјТѕСйАґЅЁБўPIDІОКэЎЈЧЁјТPIDїШЦЖПµНіФАнїтНјИзНј2-9ЛщКѕЎЈ
|
Нј2-9 ЧЁјТPIDїШЦЖПµНіФАнїтНј |
|
|
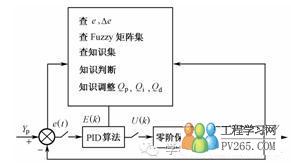
ЎЎЎЎ3Ј®ЦЗДЬPIDЧФС§П°їШЦЖ
ЎЎЎЎТ»ёцПµНіИфДЬНЁ№эФЪПЯКµК±С§П°Ј¬ЧФ¶Ї»сµГЦЄК¶Ј¬ІўДЬЅ«ЛщС§µДЦЄК¶УГАґІ»¶ПёДЙЖТ»ёцѕЯУРОґЦЄМШХч№эіМµДїШЦЖРФДЬЈ¬ФтЅ«ХвЦЦПµНііЖОЄЧФС§П°їШЦЖПµНіЎЈЦЗДЬPIDЧФС§П°їШЦЖПµНіµДЅб№№ИзНј2-10ЛщКѕЎЈёГПµНіµДМШµгКЗФЪЦЗДЬPIDїШЦЖјґ№жФтPIDїШЦЖµД»щґЎЙПЈ¬ЦШКУєНЗїµч¶ФёГїШЦЖЖчµДїШЦЖРФДЬµДЖАјЫЈ¬Ѕ«ХвёцЖАјЫЅб№ы·ґАЎёшPIDІОКэµДЧФС§П°»ъ№№Ј¬ґУ¶шК№ПµНіФЪФЛРР№эіМЦРДЬЧФ¶ЇµШ¶ФёчPIDµДІОКэЅшРРЧФС§П°єНЧФХы¶ЁЎЈН¬К±Ј¬ИфПµНіЦРіцПЦИЕ¶ЇФґ»тКЬїШ¶ФПуІОКэ·ўЙъ±д»ЇЈ¬ПµНіµДPIDІОКэТІДЬЧФ¶ЇµШРЮёДєНККУ¦ЎЈ
|
Нј2-10 ЦЗДЬPIDЧФС§П°їШЦЖПµНіЅб№№їтНј |
|
|
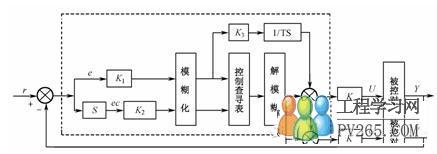
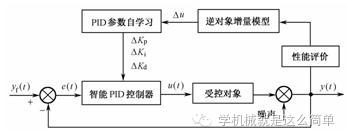
ЎЎЎЎ4Ј®»щУЪЙсѕНшВзµДPIDїШЦЖ
ЎЎЎЎТФ·ЗПЯРФґу№жДЈІўРРґ¦АнОЄЦчТЄМШХчµДЙсѕНшВзЈ¬КЗТФЙъОпЙсѕНшВзОЄДЈДв»щґЎЈ¬КФНјДЈДвИЛµДРОПуЛјО¬Ј¬ТФј°С§П°єН»сИЎЦЄК¶µДДЬБ¦ЎЈЛьѕЯУРС§П°ЎўјЗТдЎўБЄПлЎўИЭґнЎўІўРРґ¦АнµИЦЦЦЦДЬБ¦Ј¬ТСФЪїШЦЖБмУтЦеõЅ№г·єµДУ¦УГЎЈУЙµҐёцЙсѕФЄ№№іЙµДPIDїШЦЖПµНіЈ¬їШЦЖЖчКдіцїЙРґіЙЈє

ЈЁ2-14Ј©
ЎЎЎЎИЁПµКэWiЈЁi=1Ј¬2Ј¬3Ј©їЙТФНЁ№эЙсѕФЄµДЧФС§П°№¦ДЬАґЅшРРЧФККУ¦µчХыЈ¬№КїЙґуґуМбёЯїШЦЖЖчµДВіГ§РФДЬЎЈУліЈ№жPIDїШЦЖЖч±ИЅПЈ¬ОЮРлЅшРРПµНіЅЁДЈЈ¬¶ФѕЯУРІ»И·¶ЁРФТтЛШµДПµНіЈ¬ЖдїШЦЖЖ·ЦКГчПФУЕУЪіЈ№жPIDїШЦЖЖчЎЈ
ЎЎЎЎ»щУЪЙсѕНшВзµДPIDїШЦЖПµНіЅб№№ИзНј2-11ЛщКѕЎЈ
|
Нј2-11 »щУЪЙсѕНшВзµДPIDїШЦЖПµНіїтНј |
|

|
ЎЎЎЎЅьДкАґЈ¬№ъДЪНв¶ФЦЗДЬPIDїШЦЖµДУ¦УГСРѕїК®·Ц»оФѕІўіцПЦИИі±Ј¬УЙУЪІ»РиТЄИ·ЗРЦЄµАПµНіµДѕ«И·КэС§ДЈРНЈ¬ѕЯУРєЬЗїµДВіГ§РФЈ¬ЛщТФЦЗДЬPIDїШЦЖѕЯУР№г·єµДУ¦УГЗ°ѕ°ЎЈУлУ¦УГСРѕїПа±ИЈ¬єЬ¶аАнВЫОКМвЈ¬ЦоИзЦЗДЬїШЦЖПµНіµДОИ¶ЁРФєНВіГ§РФµДСРѕї»№УРґэЅшТ»ІЅµДЙоИлЎЈ АґФґ:С§»ъРµѕНКЗХвГґјтµҐ
2/2 КЧТіЙПТ»Ті12
|